Kinematic analysis of LBR iiwa robot for collaborative work
Summary
Kinematic analysis of the LBR iiwa manipulator robot of the manufacturer KUKA, with the objective of its implementation in collaborative and cooperative tasks within a work environment related to chemical laboratories, where hazardous materials are handled, or procedures are performed in an environment harmful to humans.
The Robotics, Vision & Control toolbox developed by Peter Corke for MATLAB was used as a simulation tool.
- Modeling of the kinematic chain of the robot following the Denavit-Hartenberg convention and its application in the calculation of direct kinematics.
- A possible method for the calculation of the inverse kinematics of the robot is proposed, taking into account its kinematic redundancy. This method consists of a combination of the geometric and algebraic methods by applying Pieper’s method for robots with spherical motion.
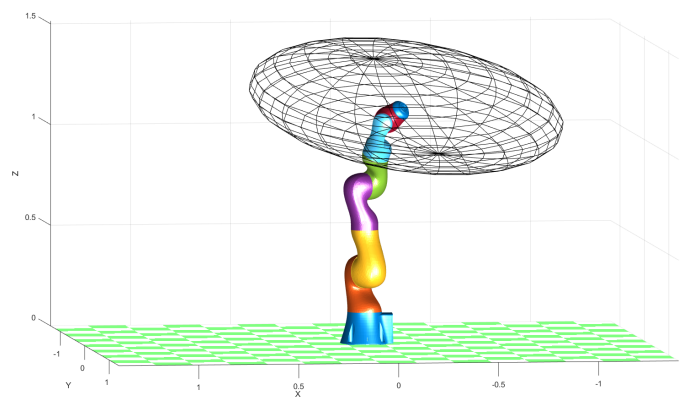
- A criterion for the determination of the third joint is proposed in order to reduce the infinite number of solutions to a finite number. This criterion is based on the optimization of the manipulability of the robot in the direction of motion.
- A comment on the procedure to find a velocity relation between joint and task space is made, and the mathematical singularities of the structure are studied analytically.
- The trajectory generation is discussed, and the results obtained in a simulation for 2 robots collaborating to perform a specific task are shown.
| Schematic from specification | Model with RVCtools toolbox by Peter Corke |
|---|---|
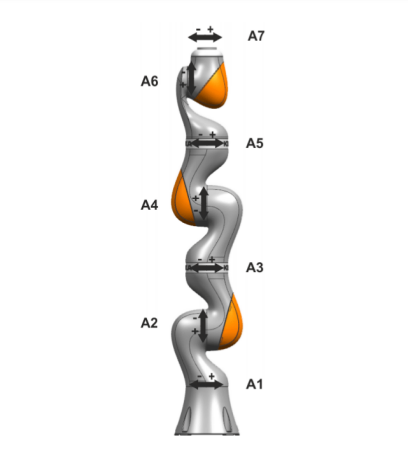 | 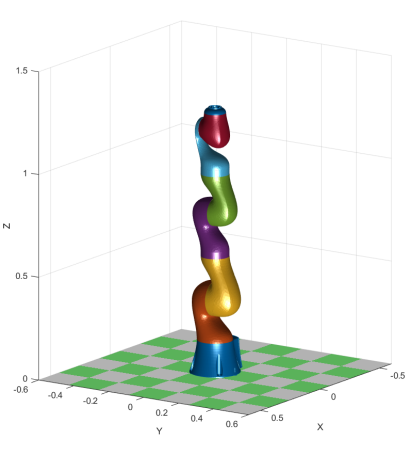 |
- Github repository: GinoAvanzini/iiwa-kinematics
- Programming language: Matlab
Report
Link to PDF: Kinematic analysis of LBR iiwa robot for collaborative work
This post is licensed under CC BY 4.0 by the author.