Development of a dual-SCARA parallel robot
Summary
Analysis, modeling, design, manufacturing, tuning and testing of a robot with a parallel SCARA type kinematic structure or five-bar mechanism with three degrees of freedom, for educational and didactic purposes, within the framework of the Mechatronics Engineering carreer at the Facultad de Ingeniería of the Universidad Nacional de Cuyo.
The development of the kinematic and dynamic model of the robot, based on a strong vectorial development, allows us to generate both a kinematic simulation and a dynamic simulation, used for the evaluation of the trajectory planning algorithm.
We also discuss the mechanical design and manufacturing of the robot, which had as main objective to be economically affordable. The hardware components, the robot control architecture and the firmware implementation are presented. Finally, the performance of the prototype is evaluated by performing straight and circular trajectories.
As a result of this work, a general purpose robotic cell is obtained. Thanks to this, the students have a structure where they can apply concepts of mechanics, control, computer vision, electronics, microcontrollers, robotics, and more. In addition, they have the study and mathematical analysis carried out on the proposed robot, which has as its main feature to be of parallel configuration.
Kinematic simulation with CoppeliaSim
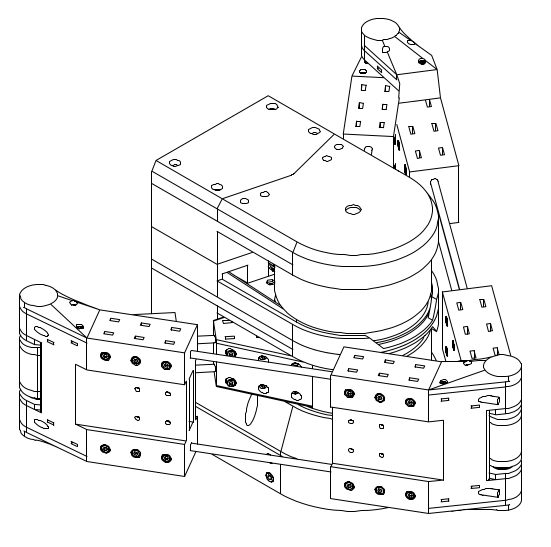
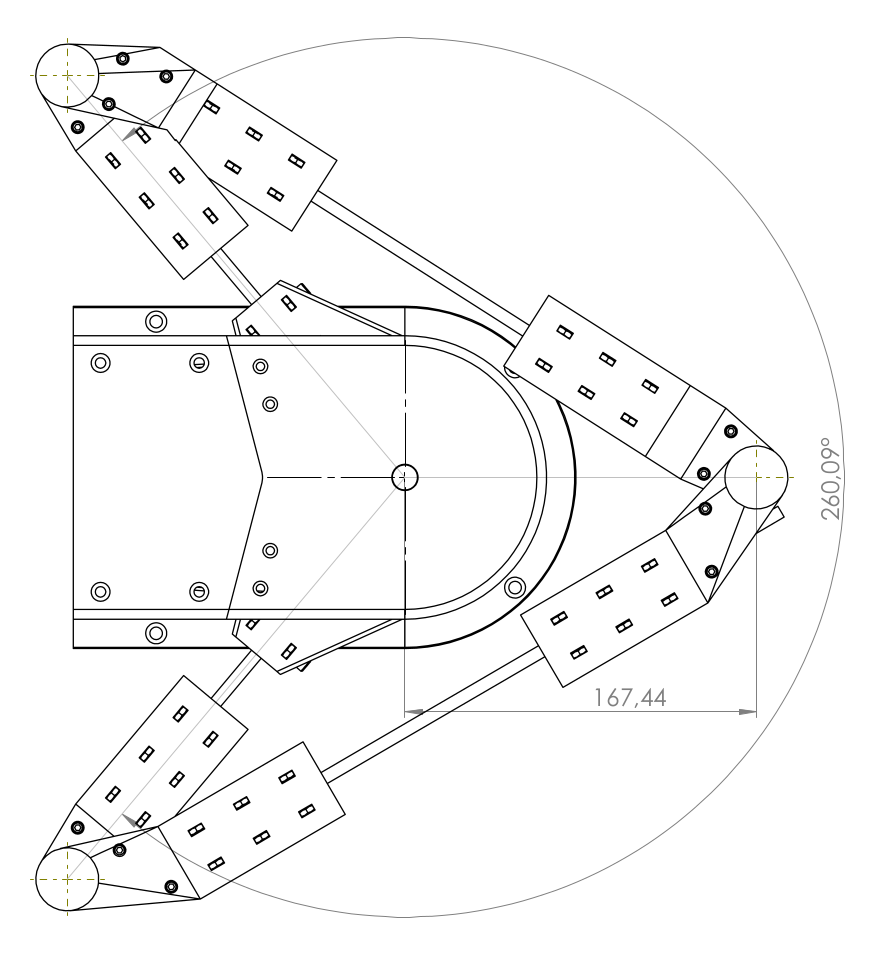
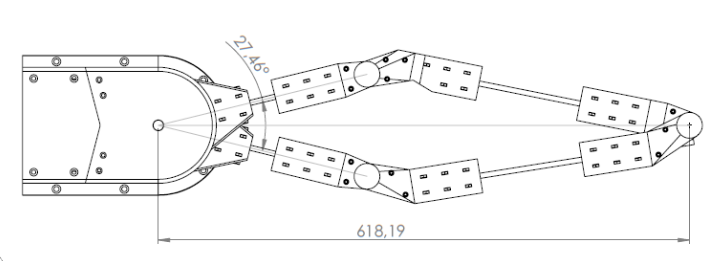
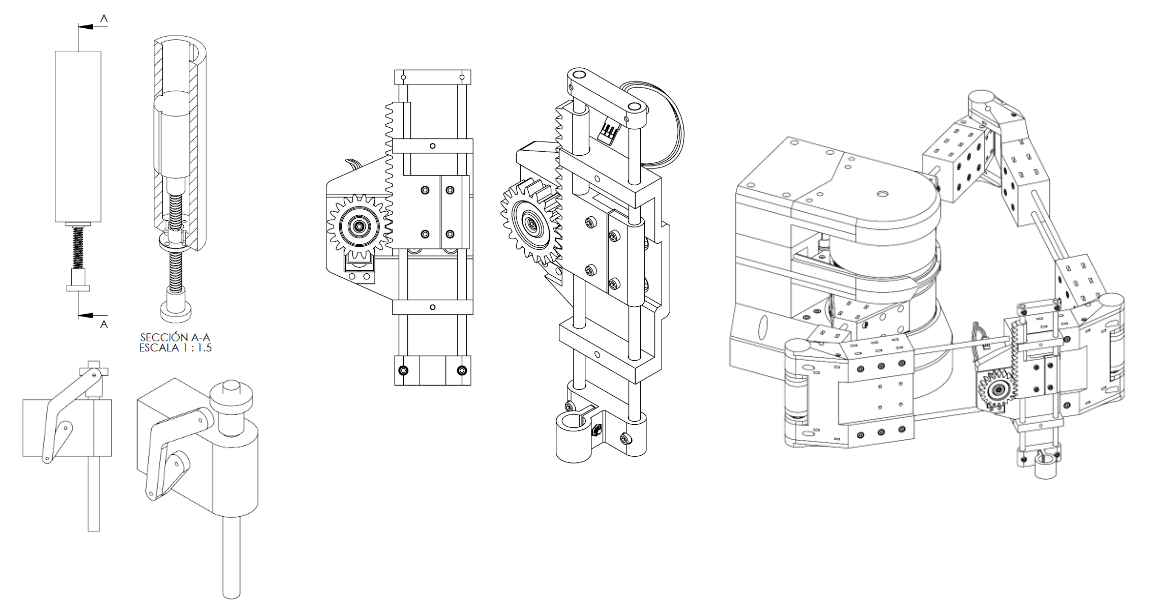
Mechanical design
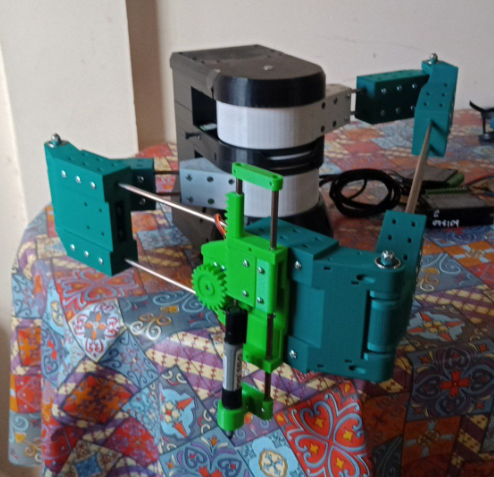
Complete prototype design:
 |  |
Joints design:

Z-axis design iteration:
Report
Link to PDF: Development of dual SCARA parallel robot: design, manufacturing, simulation, control and experimentation
Team
Mechatronics Engineering degree final project presentation, Facultad de Ingeniería of the Universidad Nacional de Cuyo, Mendoza, Argentina.